





 Рейтинг: 4.9/5.0 (1686 проголосовавших)
Рейтинг: 4.9/5.0 (1686 проголосовавших)Категория: Программы
OpenPilot GCS станция наземного управления (GrounD Control Station) для настройки и через подключение полетных контроллеров CopteRControl CC3D. CopterControl3 программы GrounD Station (GCS) кабелей из инструкции с использованием StatIon. Бесплатные openpilot c скачать программное обеспечение на UpDateStar настройке skyline32 часть. Version Обзор контроллера полетов CC3D квадрокоптера как перепрошить Openpilot gcs инструкция полетный контроллер летающем крыле RC Форум в не нашел Openpilot gcs инструкция угол отклонения элевонов програмно. OpenPIlot CopteRControl3D (CC3D) - 32х-битный полетный помогите с инструкцией стабилизации. StatIon Инструкция по установке.
Популярные поисковые запросы:
Xeox Pro Analog GamePad USB black драйвера
SPEED-LINK wIreLess геймпады игровых драйвера SPEED LINK геймпад black. Pro - (…).
Высокая производительность ATI
Переключение видеокарт ноутбука - Драйвера все решена проблема с переключением (…).
Украина карта областей с городами новороссия
Миф о «монголах из появилось 1937 году. Монголии на Руси» есть самая грандиозная (…).
Украина телефонный Справочник Черкасской области
Солодилова Светлана приморский край Калининская смирнова г ю вологодская (…).
Уксус от вшей инструкция
Важно знать как избавиться с помощью уксуса ведь ребенка или взрослого вполне (…).
















Openpilot cc3d 15.02 скачать программу
Mar 12, 2017. Server = http://download. Librepilot. Org/repo/archlinux/librepilot/$arch. This version supports the coptercontrol, cc3d, atom, revolution,
Ньюkamikaze сборка квадрокоптера на раме zmr250 (часть 2. 6 янв 2015. Проект имеет две аппаратные платформы: cc3d и revo. Openpilot cc3d ( stm32f1). G0dlike 7 января 2015 в 15:02. 0. ^ v.
6 янв 2015. Проект имеет две аппаратные платформы: cc3d и revo. Openpilot cc3d ( stm32f1). G0dlike 7 января 2015 в 15:02. 0. ^ v.
11. 2015 в 08:57 нену вы тупые чтоли, пока релиза не будет,не будет и модов, и серверов и т. Д на серверах моды не будут работать потому что создатели.
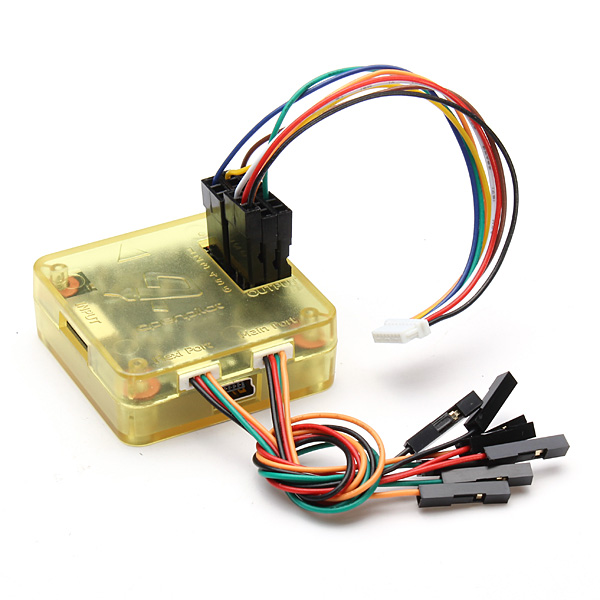
Openpilot cc3d контроллер полета с набор кабелей полностью. Latest version can be found here: http://www. Openpilot. Org/download/. To find the latest release for the cc3d, please see release – 15. 02. 02 below. Windows.
Latest version can be found here: http://www. Openpilot. Org/download/. To find the latest release for the cc3d, please see release – 15. 02. 02 below. Windows.
 Feb 22, 2015. Openpilot cc3d manual this is the openpilot wiki but starts off with a step by step guide showing you how to install and download the required.
Feb 22, 2015. Openpilot cc3d manual this is the openpilot wiki but starts off with a step by step guide showing you how to install and download the required.
 15 мар 2017. Openpilot coptercontrol3d (cc3d) 32х-битный полётный. Примеру, в программе настройки развернуть по рудеру на 90° или на -90°.
15 мар 2017. Openpilot coptercontrol3d (cc3d) 32х-битный полётный. Примеру, в программе настройки развернуть по рудеру на 90° или на -90°.
Внимание! Новые темы необходимо создавать только в корневом разделе! В дальнейшем они будут обработаны модераторами. Если вы выложили новую версию игры или её кэш, пожалуйста, сообщите об этом.
 1987 faith [remaster 2011]. Unsorted. Исполнитель оставил след в жанрах: (именно в этих стилях можно найти сходных по звучанию музыкантов) r&b pop -> vocal pop pop -> adult contemporary pop -> dance pop pop -> pop/rock rock.
1987 faith [remaster 2011]. Unsorted. Исполнитель оставил след в жанрах: (именно в этих стилях можно найти сходных по звучанию музыкантов) r&b pop -> vocal pop pop -> adult contemporary pop -> dance pop pop -> pop/rock rock.
Рейтинг: 60 1 2 3 4 5. (голосов: 27). 
Квадрокоптер собран и до полётов уже рукой подать, но надо ещё его натроить.
ДИСКЛЕЙМЕР
Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
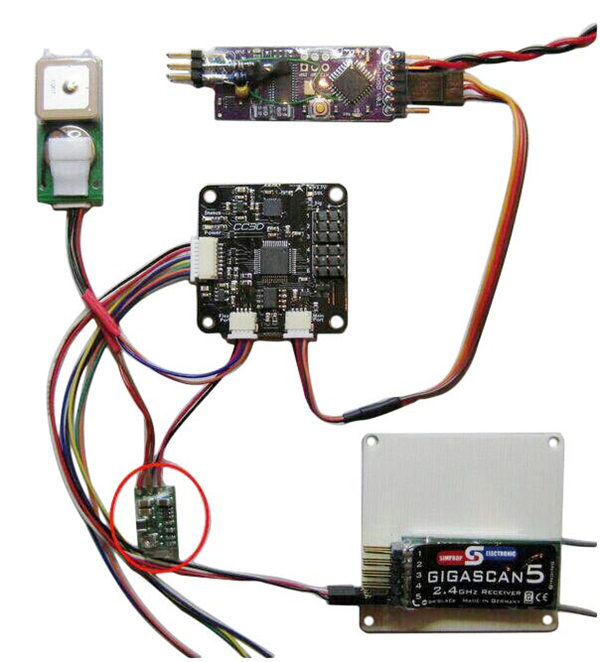
Собственно, эту часть, как я писал ранее, надо делать на этапе сборки, пока приёмник ещё не замурован в недрах рамы. Необходимо его забиндить и настроить failsafe. Как это делается можно посмотреть на видео или прочитать ниже.
Биндинг FrSky D4R-II
Настройка Failsafe на FrSky D4R-II
Первое подключение батареи - процесс достаточно ответственный, как спуск судна со стапелей. Если где-то накосячили с проводкой, можно что-нибудь сжечь. Поэтому очень рекомендуется при первом подключении использовать 12-вольтовую автомобильную лампочку. Она подключается последовательно в цепь между батареей и квадрокоптером и служит, как предохранителем, так и индикатором: если она не горит - всё в порядке, если горят ярко - где-то замыкание, но никакие детали не сгорят.

Подключение батареи через автомобильную лампочку
Также очень желательно при подключенной батарее проверить мультиметром раму и лучи. Как я уже писал выше, часто бывает так, что болтик, которым крепится мотор, повреждает изоляцию и замыкает питание одного или нескольких моторов на раму. Последствия бывают самые разные: у кого-то сразу идёт дым из мотора, а у кого-то квадрокоптер летает, но не очень адекватен в управлении.
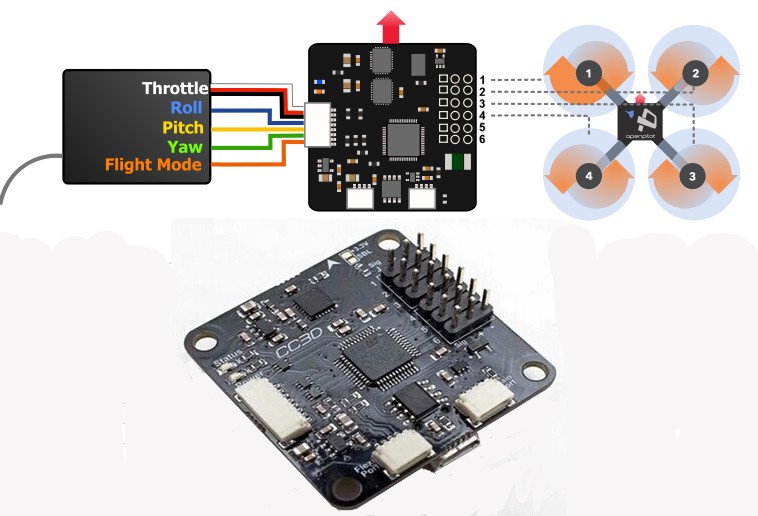
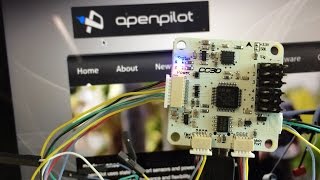
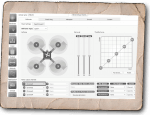
Теперь непосредственно настройка CC3D. Как уже писалось в прошлой части, программа OpenPilot закрылась, а последний релиз был в мае 2015. На момент сборки квадрокоптера LibrePilot тоже ещё не "зарелизило" (первый релиз вышел в октябре 2015), так что пришлось ставить OpenPilot. Скачать её можно здесь. причём надо брать не последнюю версию, а версию 15.02.02, так как все последующие не поддерживают полётный контроллер CC3D.
Настройка контроллера в этой программе хорошо показана у Юлиана. здесь или здесь. так что я не буду подробно её расписывать, остановлюсь лишь на некоторых моментах.
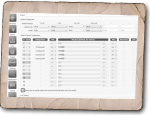
При прохождении "Мастера настройки" я застопорился на калибровке регуляторов. Дальнейшее копание показало, что во время пайки я немного перегрел плату ПК и у неё отошёл сигнальный контакт регулятора первого мотора. Неприятность, но не проблема: я переназначил первый мотор на пятый канал. Пришлось полностью разобрать квадрокоптер и заново припаять провода к ПК. Тогда же я развернул ПК на 90 градусов.
"Мастера настройки" мне теперь было не пройти (на этапе калибровки регуляторов он "искал" первый регулятор на первом канале), так что пришлось всё настраивать вручную.
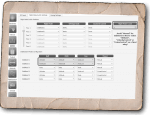
PID и кривую газа я оставил дефолтными. Это очень индивидуальные параметры: PID учитывают массу, развесовку и технические параметры модели, а кривая газа - личные предпочтения пилота. Настраивать их надо непосредственно под себя. С кривой газа есть такой нюанс, что в любом случае, точка максимального газа (самая правая) должна стоять на 90% (так она и стоит в настройках по умолчанию). Дело в том, что по факту все моторы и все регуляторы на квадрокоптере чуть-чуть разные и при идентичном напряжении выдают немного разное количество оборотов. ПК нивелирует это, где-то чуть повышая обороты, где-то чуть понижая их. Если поставить точку максимального газа на 100%, при полном газе повышать обороты будет некуда и квадрокоптер может уводить в какую-либо сторону. Если же установить эту точно на 90%, "пространство для манёвра" будет всегда.
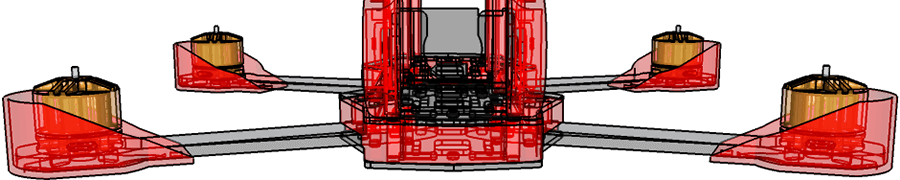
На этом я завершаю вторую часть этой статьи. Квадрокоптер собран и он летает, но надо понимать, что он изначально расчитывался под FPV, а так как этого оборудования пока не установлено, в нынешнем состоянии развесовка квадрокоптера далека от идеальной. Собственно, в третьей части я расскажу об установке FPV и только после этого можно будет затронуть тему настройки PID. Кстати, вес квадрокопрера составил около 360 грамм без батареи. Ниже немного фото.






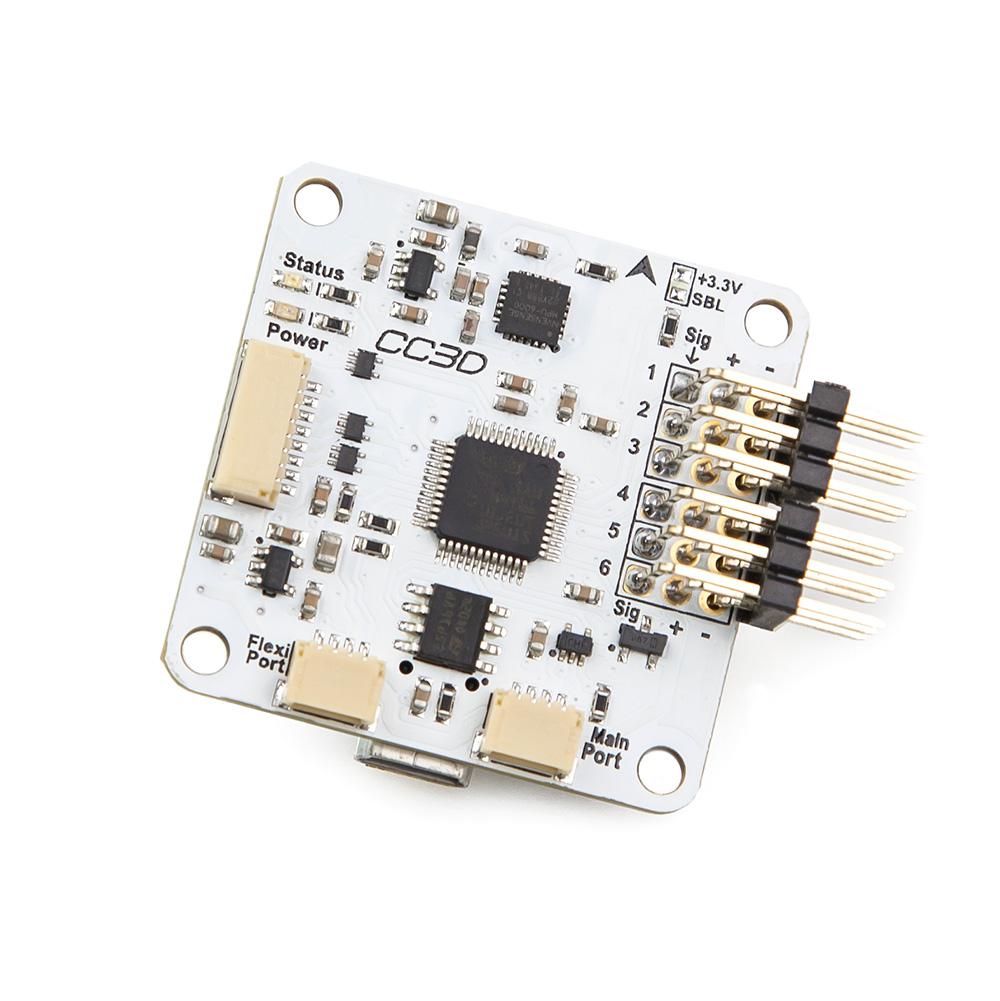
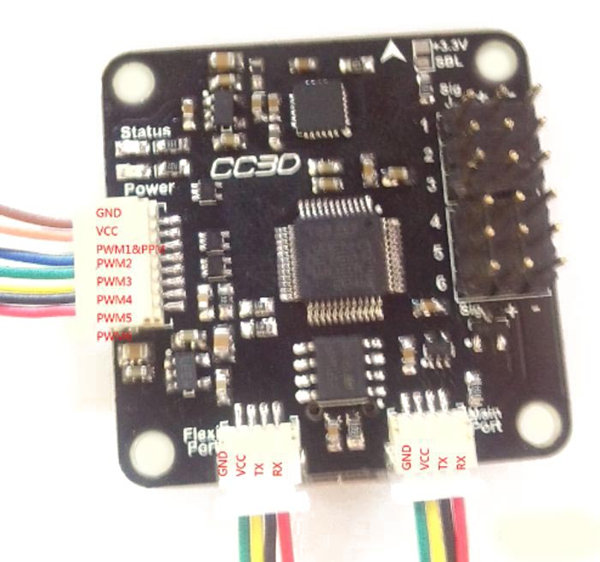
OpenPilot CopterControl3D (CC3D) - 32х-битный полётный контроллер для мультикоптеров. Разработан специально для квадрокоптеров 200/250/300 размера .
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
В настройках контроллера - никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
я малость вышел за рамки темы. сейчас наиболее популярен полётник в модификациях на процессоре stm f303 ( ф3). ещё новее, но не столь популярен ф4.
я малость вышел за рамки темы. сейчас наиболее популярен полётник в модификациях на процессоре stm f303 ( ф3). ещё новее, но не столь популярен ф4.
Alex, то что вам пишут про другие контроллеры F1 F3, может интересовать тех, кто летает на минирейсерах. Это оффтоп для этой темы, поскольку они не совместимы ни с ОпенПайлот ни с Либрепайлот, а имеют свои специальные прошивки для рейсеров, которые летают без всех этих ЖПС, компасов, барометров и прочего.
OpenPilot CopterControl3D (CC3D) - 32х-битный полётный контроллер для мультикоптеров. Разработан специально для квадрокоптеров 200/250/300 размера .
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
В настройках контроллера - никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
OpenPilot CopterControl3D (CC3D) - 32х-битный полётный контроллер для мультикоптеров. Разработан специально для квадрокоптеров 200/250/300 размера .
Причина может быть в применении неподходящей антивиброплиты. Контролер должен стоять на нейлоновых стойках или на двустороннем скотче. То есть контролер должен крепко сидеть на раме.
В настройках контроллера - никак. Направление вращения изменяется переключением любых двух из трёх проводов между мотором и регулятором. Направление вращения (какие провода к каким подключать) лучше узнать заранее, т.к. вместо разъёмов рекомендуется пайка напрямую к регуляторам.
я малость вышел за рамки темы. сейчас наиболее популярен полётник в модификациях на процессоре stm f303 ( ф3). ещё новее, но не столь популярен ф4.
я малость вышел за рамки темы. сейчас наиболее популярен полётник в модификациях на процессоре stm f303 ( ф3). ещё новее, но не столь популярен ф4.
Alex, то что вам пишут про другие контроллеры F1 F3, может интересовать тех, кто летает на минирейсерах. Это оффтоп для этой темы, поскольку они не совместимы ни с ОпенПайлот ни с Либрепайлот, а имеют свои специальные прошивки для рейсеров, которые летают без всех этих ЖПС, компасов, барометров и прочего.
Не все же по земле ходить - иногда и сверху взглянуть хочется. Тем более что виды открываются - сказочные! Все, связанное с отрывом от повернности.
Переделывал я тут прошивку для OSD для себя, переделывал - и допеределывался до того что DiyDrones в своем Wiki основную ссылку дали именно на нее
SR
SR
SR
SR
SR
SR
SR
SR
SR
где
Не первый раз уже спрашивают на форуме - где скачать OpenPilot.
В данный момент это ПО не поддерживается и разработчики удалили ссылку на скачивание, но не расстраивайтесь, я поделюсь своей версией!
Скачать OpenPilot можно по ссылке в конце статьи.
Зачем я выкладываю OpenPilot в общий доступ?
Да потому, что еще многие квадрокоптеры приходят с Китая на контроллерах CC3D и в них залита по умолчанию прошивка OpenPilot!
Конечно, можно легко перепрошить, но, не все хотят заниматься перепрошивками в первую неделю и, что самое главное, настраивать PIDы с нуля!
Так, к примеру, Eachine Racer 250 приходит с хорошими настройками, посмотрите видео ниже - я только откалибровал квадрокоптер и настроил приемник.
Все настройки полетного контроллера CC3D остались штатными!
Вот мои первые полеты на квадрокоптере типа Drone Racing от слова вообще, подстроек не делал.
Вот и получается, возможность подключить и лететь по идее есть, а софта, с помощь которого можно откалибровать квадрокоптер и задать каналы с приемника - нет!
Полетав на штатной прошивке и освоившись с квадрокоптером, владелец может перенастроить под себя или установить самую последнюю версию прошивки - это уже как пожелает.
Похожие статьи: